


坐標轉換中的七參數詳談,測量員值得收藏
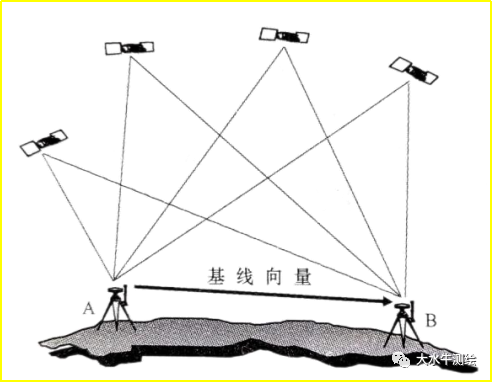
坐標轉換永遠是測繪工作離不開的一個話題。坐標轉換的方法很多,有的方法可以用相應的參數來描述,其中使用較廣的一個是七參數。七參數大多用于不同坐標系統間的基準變換。
七參數的由來
對于非測繪的專業人士可能不太能理解“基準”這個詞語。簡單的理解就是坐標數值的零點,比如空間坐標的原點,再比如大地坐標的起算面。定義一個坐標系的三個基本要素是原點、指向、尺度。原點即坐標系的原點,指向即坐標軸的指向,尺度即長度單位和橢球。由于各個坐標系,或者說定義坐標系的組織所確定的這三個要素都有所區別,這就產生基準的變換,并且使用七參數在空間坐標中進行基準變換。

什么是七參數,又有哪七個參數呢?
七參數主要分為3類參數,旋轉、縮放和平移。縮放,表示為k,主要是由于測量誤差產生的;平移為3個坐標軸方向上的平移,表示為dX、dY、dZ,這是由于原點不一樣產生的;旋轉為3個坐標軸的旋轉,表示為rX、rY、rZ,這是坐標軸指向不一致產生的。
值得注意的是,旋轉存在方向的問題;不同的軟件,或者說不同地域的人的習慣差異,致使旋轉方向不一致,比如南方集團與天寶七參數旋轉方向一致,但與ArcGIS的就相反。因此同一個七參數在不同軟件中使用時需要考慮旋轉方向的問題,適當的時候做相應的變換才能完成正確的坐標轉換,即旋轉方向定義相反時,旋轉角取其相反數。
平移的單位為對應的長度單位,我們常用米;旋轉的單位為秒,原因是各個坐標系間指向的差異都很小;縮放的單位是PPM(part(s) per million,百萬分之一),也就是說縮放是一個特別小的數值,這是因為坐標轉換前我們都會率先統一單位,所以縮放數值也就體現了測量誤差等因素的影響。

七參數的應用
參數的應用過程細分為旋轉、縮放、平移三個過程。這三個過程的順序是如何的,我們來看一下公式:

簡化為:
![]()
上式中,X1為原始空間坐標,X2為目標空間坐標,K為縮放,R為旋轉,dX為平移。
可以看出,該順序是先旋轉,再縮放,最后平移。當然與之相反的是先平移,再縮放,最后旋轉,這是一個可逆的過程,方便了兩個空間坐標來回的轉換。這里為了方便說明,我們將旋轉、縮放、平移定義為七參數的正應用;平移、縮放、旋轉定義為七參數的反應用。
我們可以看看EPSG對一個坐標系定義:
+proj=longlat+ellps=krass+towgs84=28,-121,-77,0,0,0,0
其中七參數作為基準的定義,叫做towgs84,字面理解是轉換到wgs84所需的七參數,作用同樣是為了不同坐標系間的基準變換。EPSG在進行基準轉換前必須要說明原始的towgs84和目標的towgs84兩個七參數。
那么問題來了!
兩個七參怎么進行基準變換呢?為什么和WGS84有關系呢?在對比我們的熟悉的工程之星和SGO的坐標轉換,通常都只有使用一個七參的情況,這又如何理解呢?
首先,工程之星和SGO大多的轉換場景都是WGS84坐標轉換到XIAN80、Beijing54、CGCS2000等坐標,這里使用的七參數是原始坐標系直接到目標坐標系的七參數;而EPSG定義的七參數(基準)是坐標系本身轉換到WGS84坐標的七參數,只要兩個坐標系都知道如何轉換到WGS84坐標,其實就間接的知道這兩個坐標系間的基準變換。
至于為什么是WGS84,這是歷史原因造成的。因為WGS84是最先建立起來的全球坐標系統,衛星定位大多得到的是WGS84的空間或者大地坐標,為了能轉換為自己的定義坐標系下的坐標,都需要自身建立與WGS84的關系。
最后一問題,EPSG如何用兩個七參數進行基準變換。回到之前七參數的正反應用問題,原始坐標系的towgs84將原始坐標轉換為WGS84的坐標(以下簡稱84坐標),這里是正應用。得到84坐標后使用目標坐標系的towgs84得到最終的坐標,這里是反應用。其實我們的工程之星和SGO坐標轉換的原始坐標系和目標坐標系都可以指定七參數,只是使用的頻率較低常被我們忽略。但與前述的過程相反,原始坐標系的七參數是反應用,目標坐標系的七參數是正應用。隨著我們南方的發展壯大以及與國際的進一步接軌,使用兩個七參數進行基準變換的場景會越來越多,比如我們的新軟件GIStar,我們需要好好的理解其原理和過程,同時清楚現有功能和新功能的差異,使坐標轉換更加得心應手。

七參數的細節
與towgs84相反的是fromwgs84,在旋轉和縮放很小的前提下,兩者互為相反數。fromwgs84可以參考天寶的坐標轉換工具。如何區別towgs84和fromwgs84呢,其實很好理解,七參數正應用使非84坐標轉換為84坐標,那么該七參數為towgs84;七參數正應用使84坐標轉換為非84坐標,那么該參數為fromwgs84。我們工程之星和SGO以wgs84為原坐標系的轉換場景,其使用的七參數都為fromwgs84。
回到前面提到的公式,該場景下X1為84坐標,X2為非84坐標,例如XIAN80,那么k、R和dX組成的七參數為fromwgs84,X2與X1調換,則為towgs84。

七參數的求解
求解7個參數,我們至少需要7個方程,一對空間坐標可以列3個方程,也就是說我們需要至少3對點,通過最小二乘的方法解算出七參數。當然點的數量也是有講究,不是剛好3個點就好,也不是點越多越好,具體需要參考實際情況。
七參數作為基準變換的工具,其適用較大的區域乃至全球,我們需要在該區域選擇均勻分布的控制點來求解七參數。小區域所求解的七參數是不適用的。這里再提一下towgs84和fromwgs84,原為非84坐標,目標為84坐標,所求得的七參數為fromwgs84,相反則為towgs84。
以上為坐標轉換七參數的介紹,希望對大家有所幫助。
更多相關

華測悟界X30發布:國產RTK新旗艦
在華測導航持續深耕高精度定位技術的版圖上,悟界X30RTK的發布,無疑標志著國產GNSS接收機在性能、智能化與綜合服務能力上的一次重大躍升。它不僅是一臺測量工...

測繪地理信息局緊急為茂縣山體滑坡提供測繪地理信息保障
6月24日6時左右,四川阿壩州茂縣疊溪鎮新磨村突發山體高位垮塌。在四川省政府和國家測繪地理信息局的指揮部署下,四川測繪地理信息局黨組副書記、副局長楊升緊急趕往省政府,參加省委常委、常務副省長王寧主...

觀測準靜止鋒 CW-15多氣象要素探測無人機系統
最近,一組長了“大長腿”的縱橫大鵬CW-15無人機的照片刷爆了鵬人圈。 很多鵬友都在疑惑,CW-15無人機搭載什么新設備? 4月15日,縱橫股份與成都遠望聯合研發的首架垂直起降固定翼無人機CW-1...
賽維板報丨GNSS 定位的基本原理
GNSS定位原理GNSS衛星定位,實際上就是將分布在天空的高軌衛星當做已知點,根據GNSS系統的組成原理可知,每顆GNSS衛星瞬間位置都可以計算出來,并且通過衛星信號發送到地面GNSS接...

基于BIM的AR(增強現實)放樣測量技術應用在建設項目中的重要意義
BIM是BuildingInformationModeling的縮寫,通常將其翻譯為建筑信息模型。BIM是一種建筑全生命周期信息化管理技術,具有可視化、協調性、模擬性、優化性和可出圖五大特點。...

【技術指南】中緯ZOOM75&ZOOM95測量機器人測量操作
具體詳細步驟首先進入到要設置的作業,在測量主界面,點擊【設站】,進入設站、定向界面。按需選擇定向方法,完成設站、定向,本次以“已知方位角定向”為例,選擇完成后,點擊【下一步】。選擇或輸入測站、儀器高,...

“厲害了!1+1”丨如此輕松測導線,就用測量機器人聯合“導線助手Pro”軟件
在精密控制測量和變形監測項目中,由于要求的精度較高,因此不能采用常規的測量點坐標的方式進行,而必須按照多測回測角的模式對測量點進行多個測回的全圓觀測,并且在測量過程中還需要對角度和距離進行各種限差的檢...

7月1日起,2000國家大地坐標系全面啟用!
按照《國土資源部國家測繪地理信息局關于加快使用2000國家大地坐標系的通知》(國土資發〔2017〕30號)要求,原國土資源部(現自然資源部)確定,2018年6月底前完成全系統各類國土資源空間數據...
 環球測繪微信
環球測繪微信